Andrew Thompson
projects
publications
about
contact
[projects]
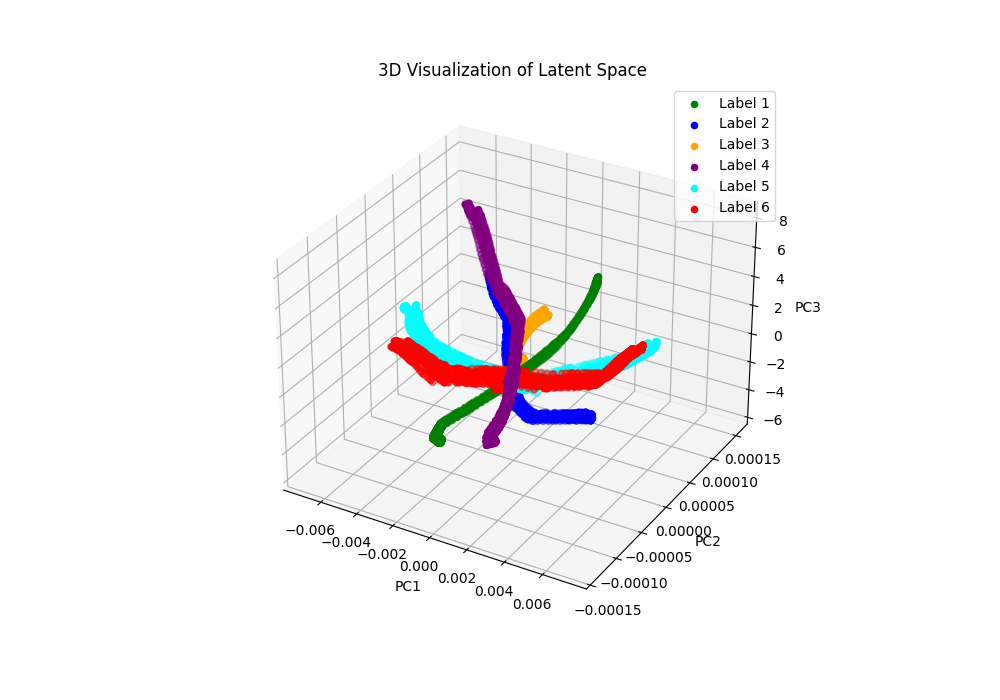
SSVAE-Based Latent Control Mapping for Assistive Robotic Interfaces
Body-Machine Interface for 6-DOF Robotic Arm Teleoperation
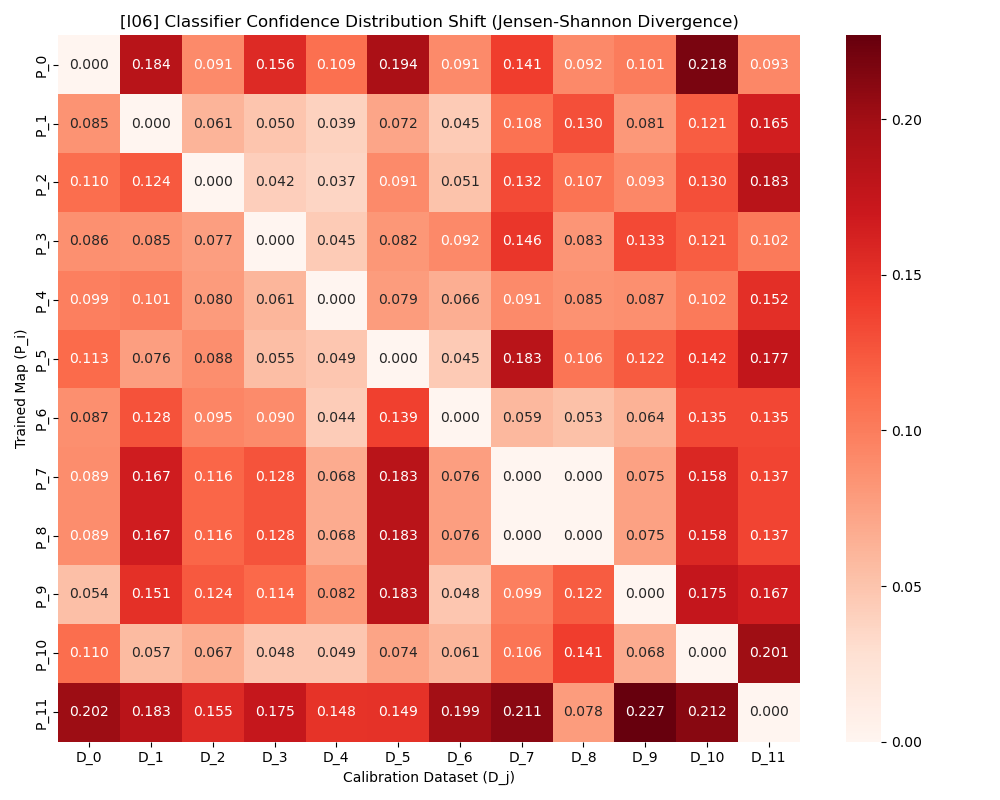
Bias-Aware Interface Remapping for Assistive Teleoperation
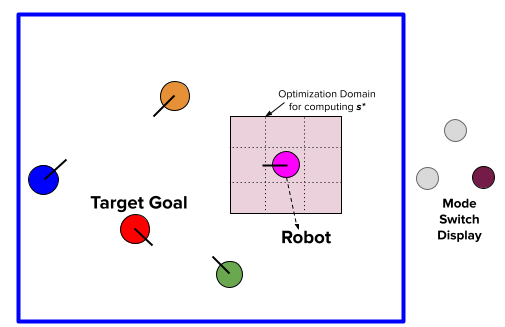
Contextual Nudging for Intent Disambiguation in Assistive Shared Autonomy
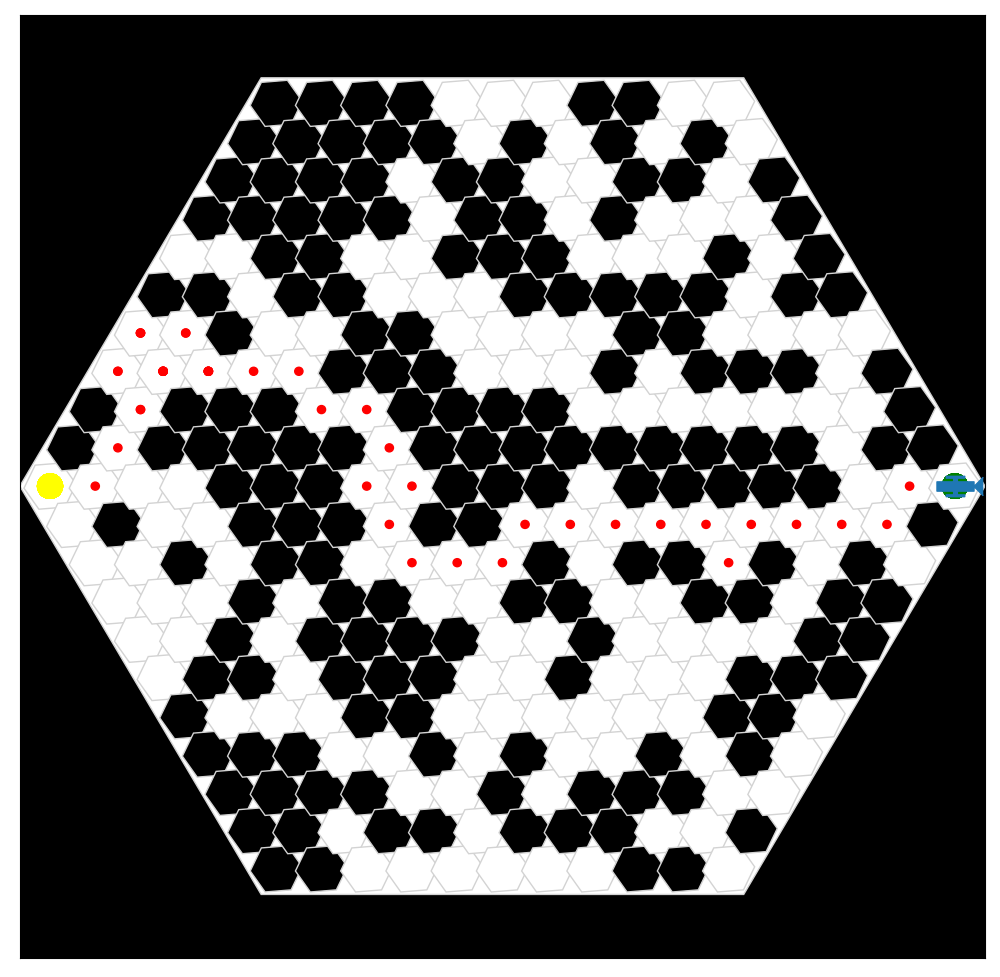
Bioinspired algorithm for efficient exploration in a densely-occluded environment
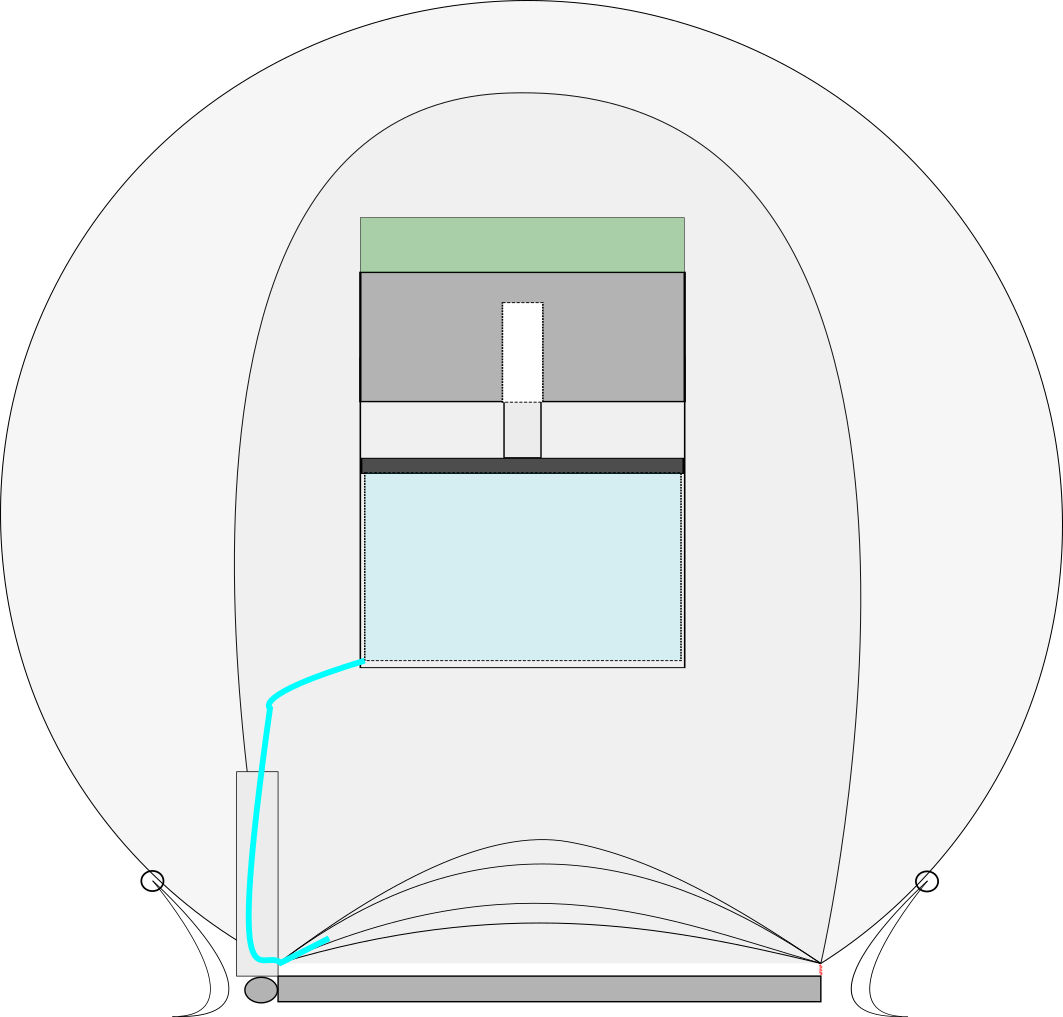
Bioinspired proposals for a fluid-activated jumping mechanism
Motion primitive classification for user teleoperation (pilot study)
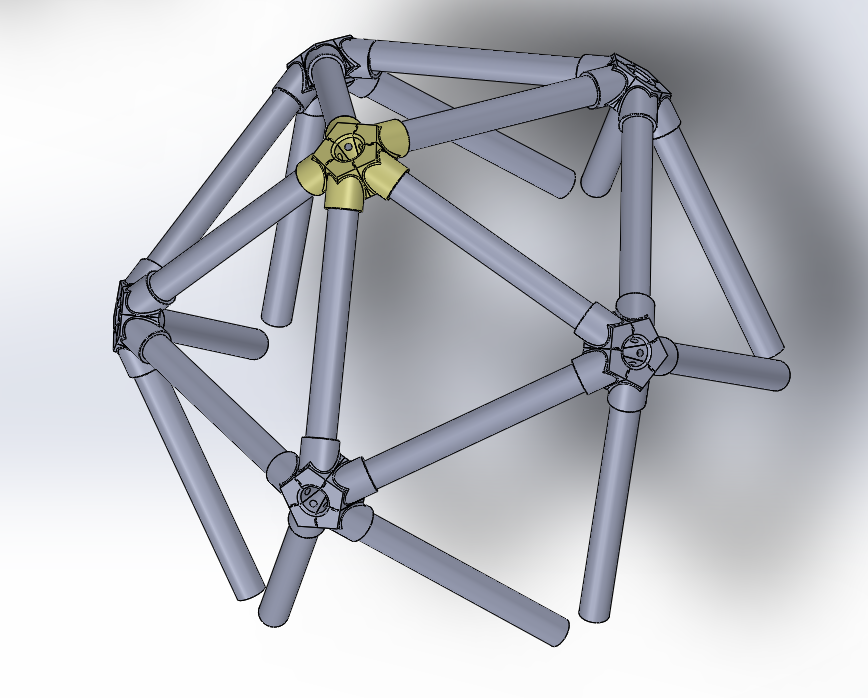
Icosahedral experimental cage for center-out reaching tasks
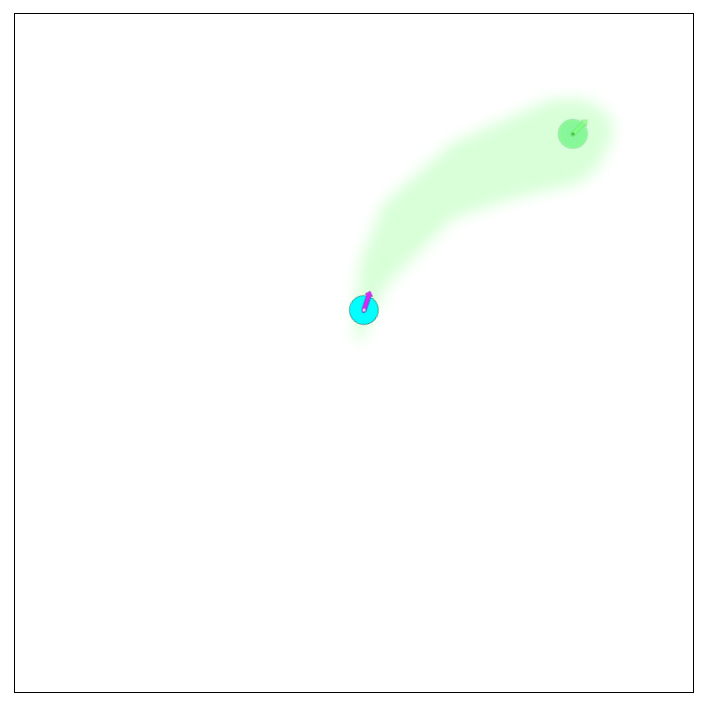
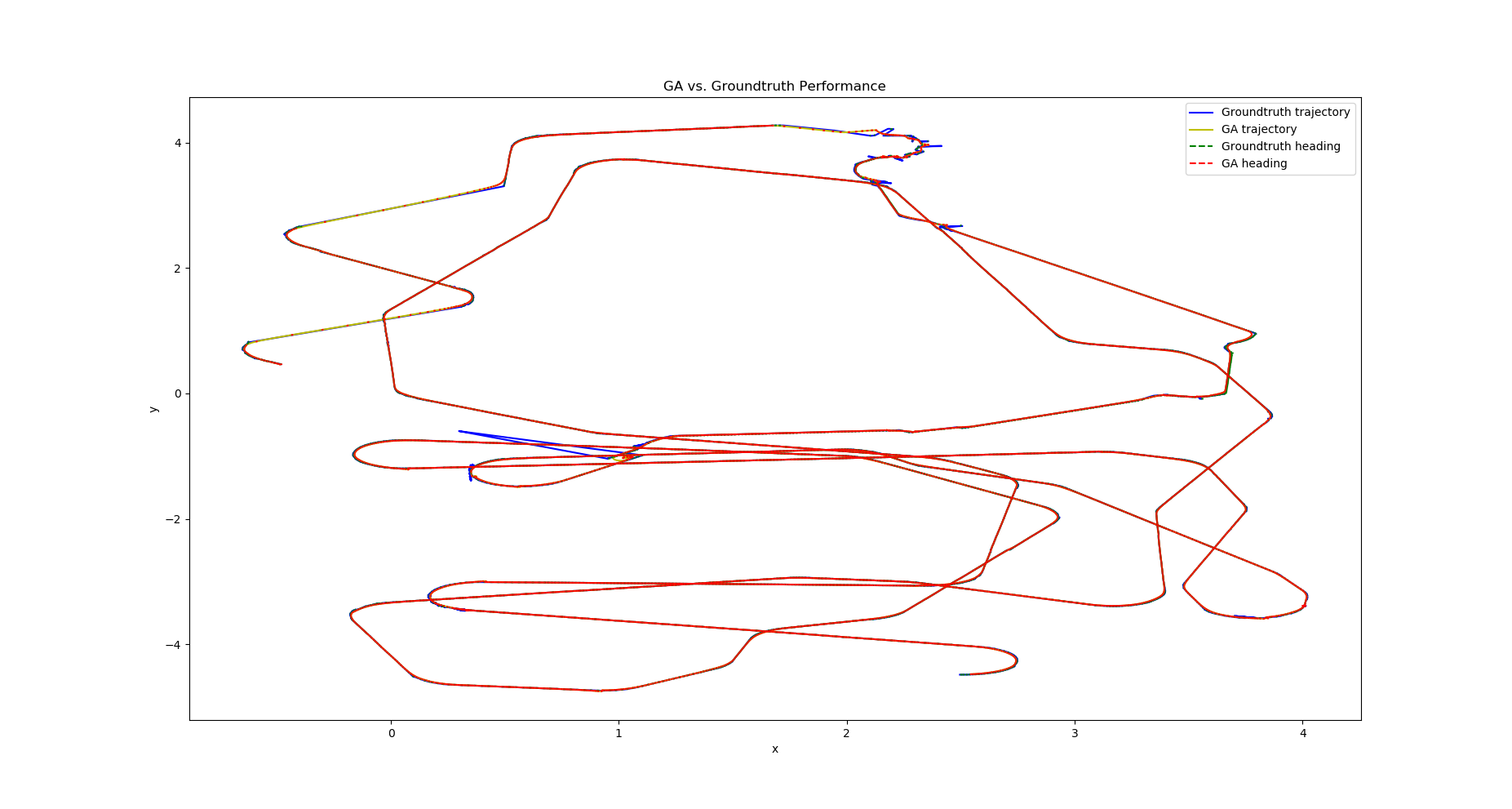
Genetic algorithm (GA) for path-planning with a differential-drive robot
Upper Limb Exoskeleton SEA Joint
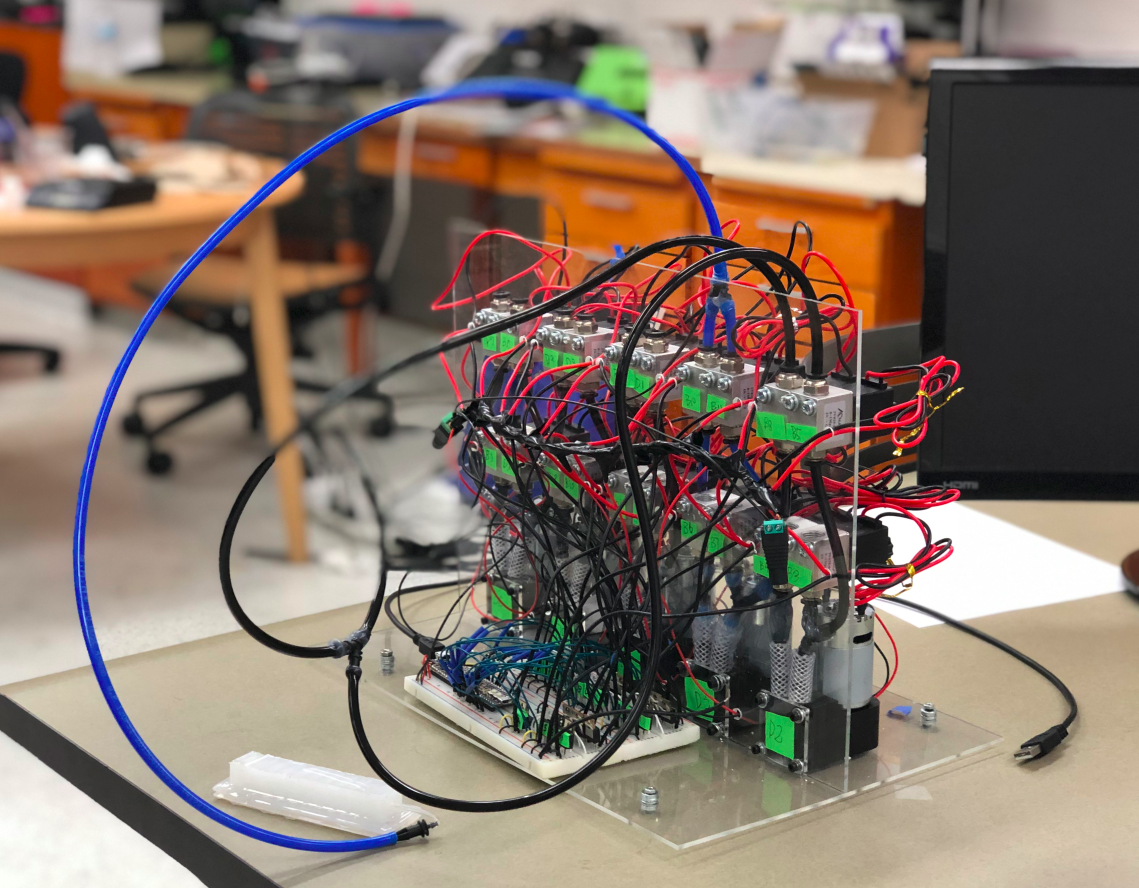
Manifold for Pneumatic Actuation
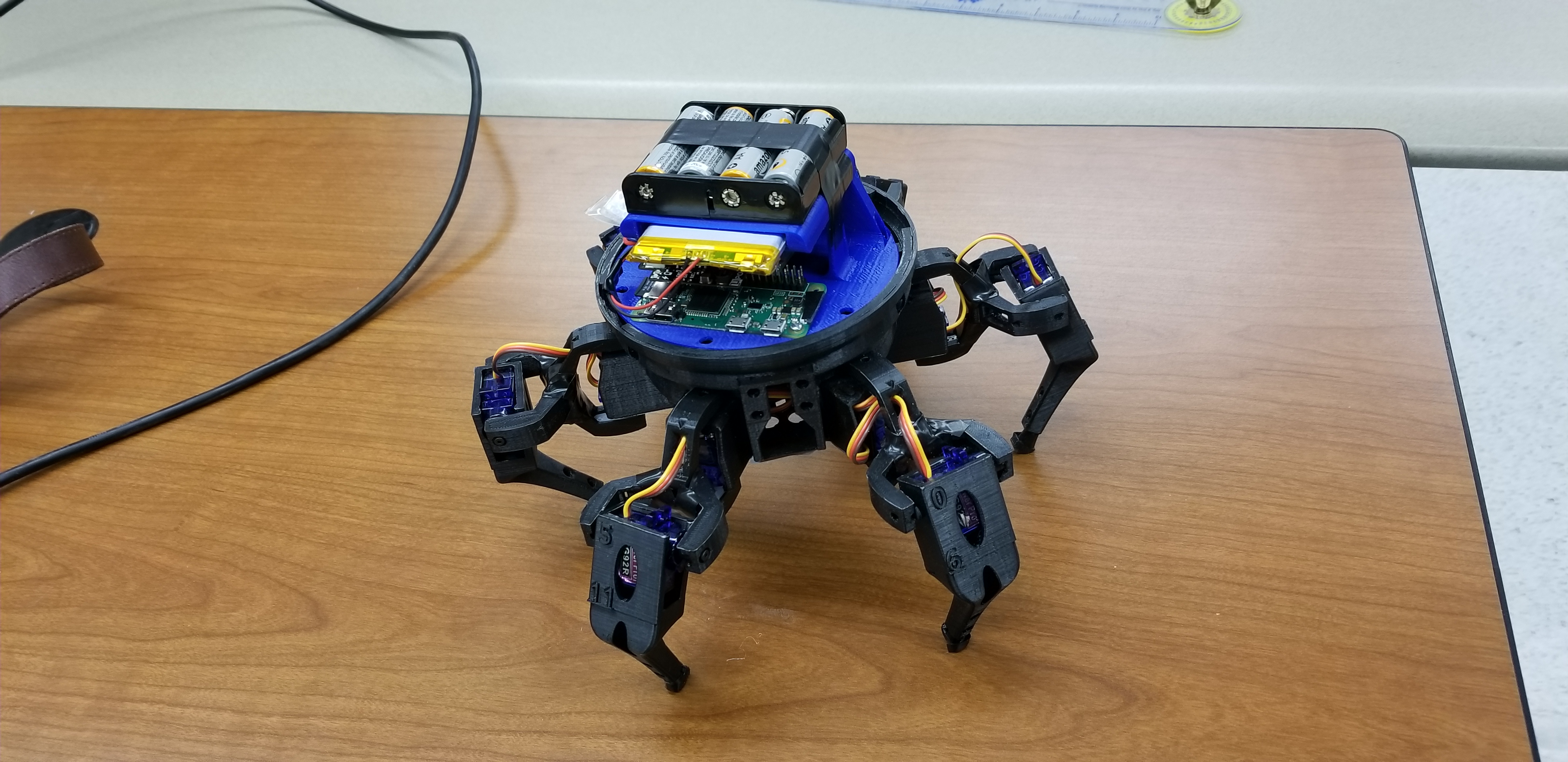
Hand-Tuned Compliant Hexapod
Line-Following Vehicle
Bipedal Descender
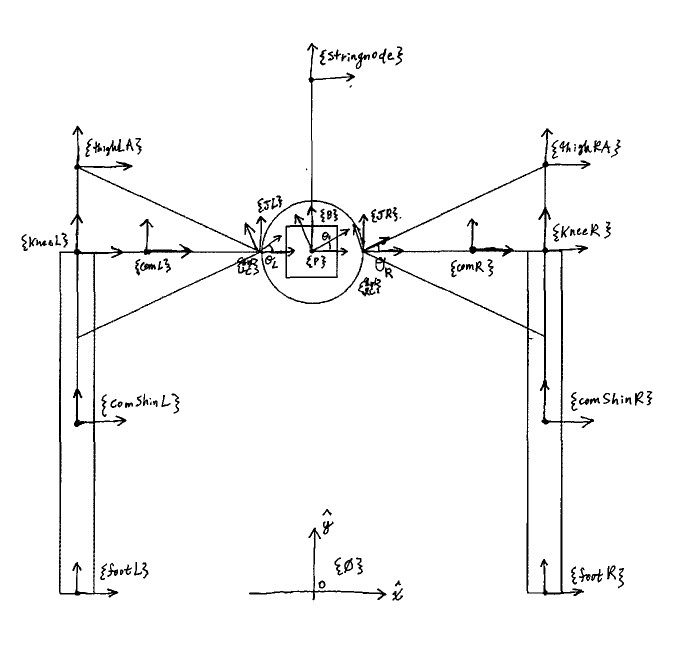
Legged Robotics Dynamics Simulation
Interactive Pong on Sawyer Robot