Body-Machine Interface for 6-DOF Robotic Arm Teleoperation
Real-time human-in-the-loop control using wearable IMUs and low-dimensional motion mappings
Andrew Thompson, Fabio Rizzoglio, Fiona Neylon, Demiana Barsoum, Max McCune, Lucy Ammon, Brenna Argall, Lee Miller | Northwestern University + Shirley Ryan AbilityLab
Read the full paper (PDF)
—
Overview
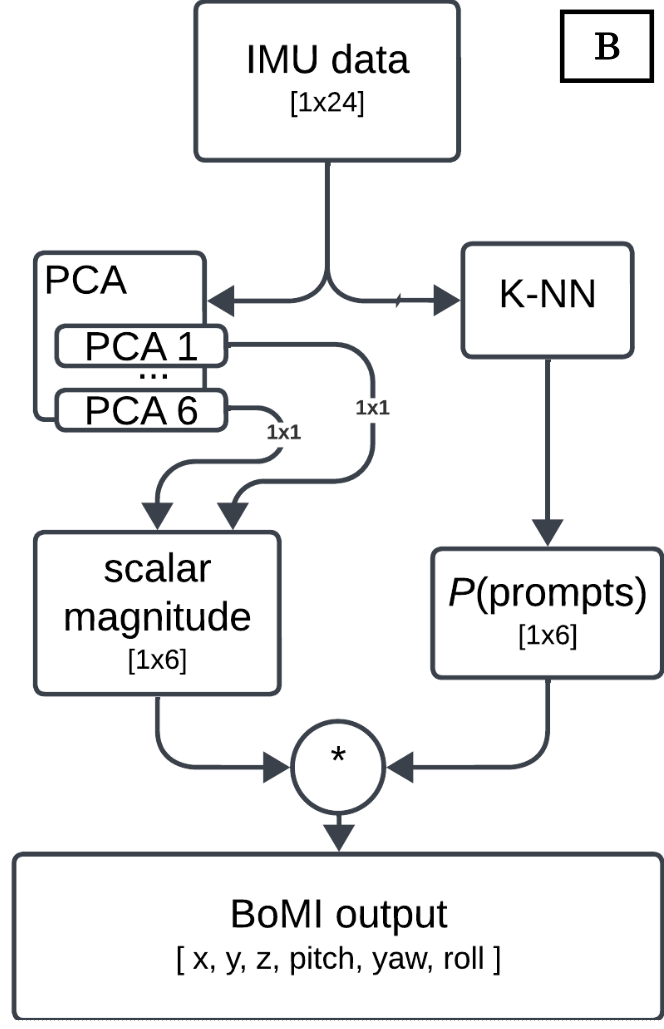
This system enables individuals with cervical-level spinal cord injuries (SCI) to teleoperate a 6-DOF robotic arm in real time using residual body motions. It uses wearable IMUs and a participant-specific PCA-based control mapping to transform high-dimensional motion data into robot control commands without requiring mode switching. The system was deployed in a longitudinal, IRB-approved human-subject study and served as the basis for ongoing research into generative alternatives.
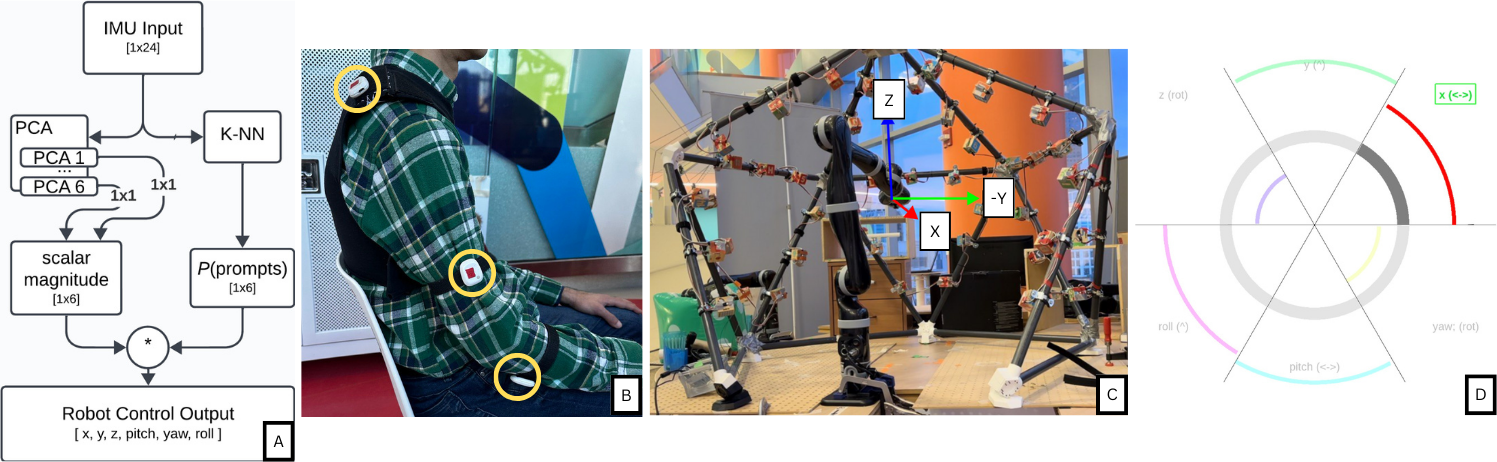
System Architecture
Key System Components
PCA-Based Mapping
- Calibrated for each participant using motion demonstration trials.
- PCA projection used to reduce dimensionality and map to 6-DOF Cartesian velocity (Twist) control.
- Allowed full-rank continuous control without the need for explicit mode switching.
ROS2 Integration
- Custom C++ ROS2 driver for x-IMU3 sensors.
- Handles real-time quaternion streaming, timestamp synchronization, and message publishing.
- ROS2 nodes handle teleop, filtering, GUI feedback, and system-level coordination.
Feedback and User Interface
- OpenGL-based GUI for target tasks and visual performance feedback.
- Displays real-time cursor, active target regions, and system state indicators.
- Designed for cognitive load minimization and accessibility.
Study Deployment
- Deployed with 10 participants with SCI in 190+ sessions.
- Participants performed planar reach, 3D manipulation, and alignment tasks.
- No mode switching required during control tasks.
Design Considerations & Tradeoffs
| Design Challenge | Strategy / Solution |
|---|---|
| Remove need for mode switching | Full-rank PCA-based projection per user |
| Smooth control vs. responsiveness | Madgewick & 2nd order Butterworth filters, tunable cutoff |
| Robustness across ability levels | Per-user calibration with fallback for 3–DoF cases |
| Safety-critical use case | Hold-to-enable switch, velocity bounding, kill switch |
Results
- Users achieved stable, full 6-DOF control using individualized motion spaces.
- Across-session improvements in performance and confidence were observed.
- The system maintained real-time performance across a range of motor profiles.
- Dataset from study now forms the basis for post hoc modeling and evaluation.

Subsection: VAE-Based Mapping (Ongoing Generative Work)
As a follow-up to the PCA-based deployment, we trained VAE-based generative latent models on participant data. These models aim to support:
- Robust few-shot control embeddings
- Intent disambiguation via latent uncertainty
- Smooth interpolation across motion samples
The VAE-based system is currently undergoing evaluation for generalization, stability, and interpretability. It has not been deployed in the study.
Repository & Access
This system is implemented across internal private repositories maintained by our lab.
- ROS2 IMU wrapper (x-IMU3) → release pending
- Unity–ROS2 TCP back-end → under internal documentation review
- Example CSV logs and controller configs available upon request