Contextual Nudging for Intent Disambiguation in Assistive Shared Autonomy
Information-theoretic shared control to reduce user cognitive load in ambiguous task environments
Deepak Gopinath (First Author), Andrew Thompson (Second Author), Brenna Argall Lab
Overview
This project introduced a real-time shared autonomy controller that uses information-theoretic reasoning to detect and resolve user intent ambiguity during assistive robotic teleoperation. The system proactively suggests control directions by nudging the robot toward states with high expected information gain—thereby accelerating disambiguation while preserving user control authority.
The system was deployed on a Kinova Gen2 robotic arm and tested in simulated and physical scenarios. It served as a foundation for developing more interpretable, user-centered shared control frameworks in assistive contexts.
Motivation
- In shared autonomy, user intent can be ambiguous, particularly when goal targets are similar or when input is noisy.
- Traditional approaches rely on full goal prediction, which introduces latency or instability.
- Our system instead prioritizes action selection that reduces intent uncertainty, inspired by concepts from active learning and information theory.
System Design
Mutual Information-Based Nudging
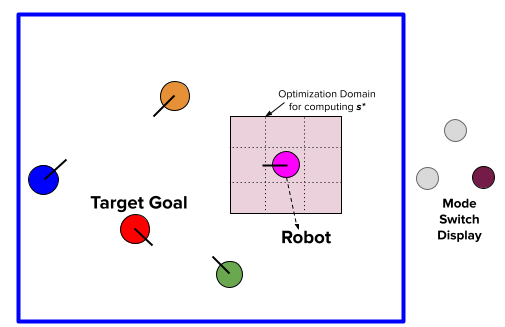
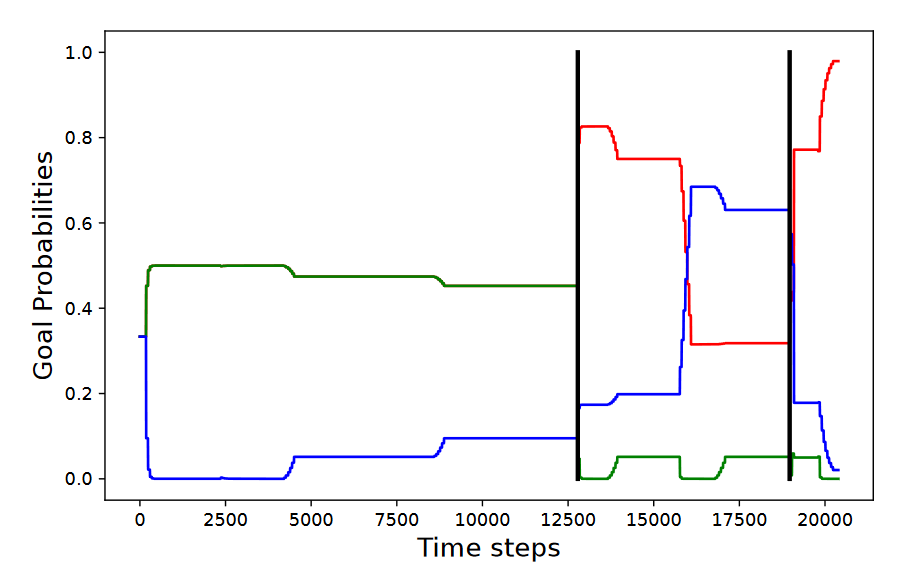
- System maintains a belief distribution over candidate goals.
- At each timestep, it evaluates candidate control actions using:
- Expected information gain: how much an action would clarify user intent
- Task progress: how much it moves toward all goals
- Selected actions are blended with user input using a confidence-weighted arbitration scheme.
Core Components
- Intent Belief Module: Bayesian update based on observed user inputs
- Action Evaluator: Computes MI between actions and goals
- Control Arbitration Layer: Blends human and nudge commands
- ROS Integration: Deployed with Kinova Gen2 arm in real-time loop
Experiments
- Environment: Discrete and continuous goal layouts (3–8 possible targets)
- Users: 8 participants, including motor-impaired individuals
- Conditions:
- No nudging (baseline)
- Confidence threshold-based switching
- Mutual information nudging
Metrics
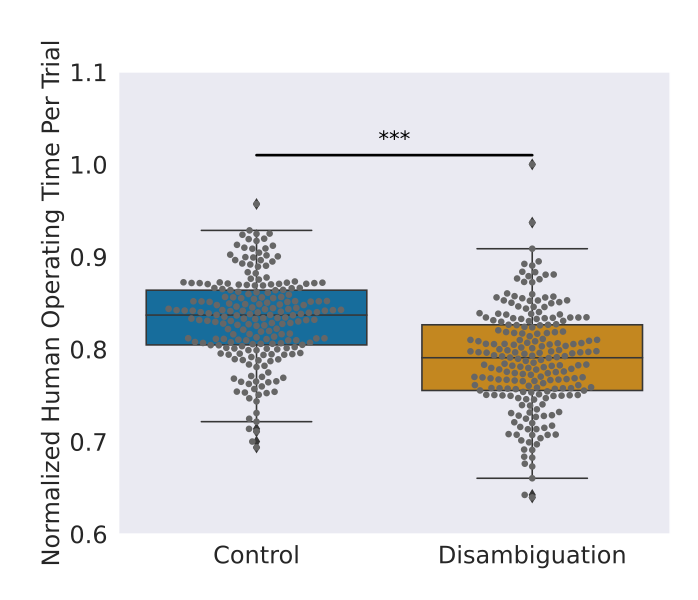
- Task completion time
- Time to disambiguation
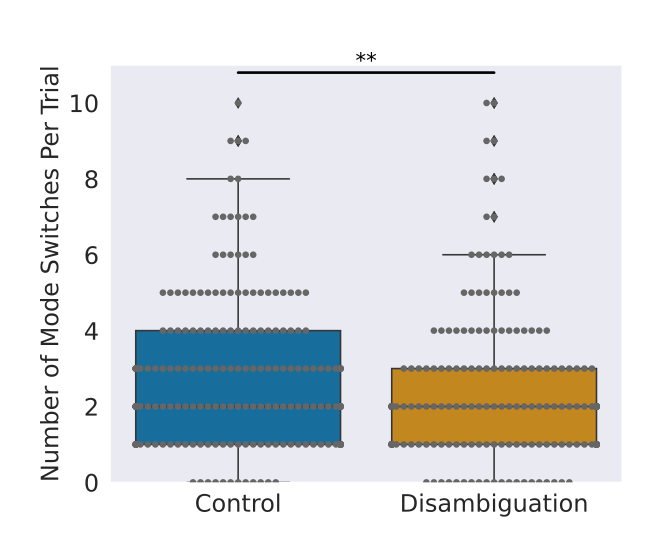
- User override frequency
- Subjective workload (NASA-TLX)
Key Results
- Nudging led to faster disambiguation and more confident goal selection compared to baseline and threshold switching.
- Participants retained high control authority and reported lower subjective workload.
- System improved transparency by guiding users subtly without enforcing hard switches.
- Demonstrated feasibility of using real-time mutual information optimization for shared control in physical systems.
Publication
Algorithmic Foundations of Robotics (WAFR), 2022
Information-Theoretic Intent Disambiguation via Contextual Nudges for Assistive Shared Control
Deepak Gopinath, Andrew Thompson, Brenna Argall
Link to publication (PDF)
Access
- ROS and Python-based implementation in private lab repository.
- Evaluation scripts and simulation data available upon request.
- Code written for compatibility with Kinova Gen2 ROS driver and teleop pipeline.