Bioinspired proposals for a fluid-activated jumping mechanism
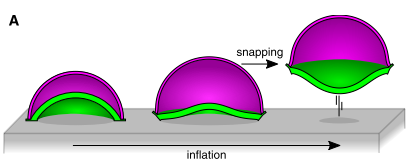
I animated these two designs for a project in the course “Signals and Sensing”; the goal was to design (in two-person groups) a novel actuation method based on pre-existing actuation methods in biology. Our group (classmate Ermyntrude Adjei and myself) focused on the explosive jumping mechanism found in the leg structure of grasshoppers, locusts, and other Acrididae. Both designs utilize isochoric snappers—a current trend in compliant actuation research that involves using the energy released via the (mechanical) snap-through buckling of certain plastic membranes.
See details of our proposed designs in this slide-deck!
Design 1:
This design relies on a central isochoric snapper for propulsion, and utilizes internal soft actuators to help control the dynamics during flight.
Design 2:
This design is meant to roll and bounce with directional control afforded only by the manipulation of the ‘foot’ (which serves as an intermediate impact surface—a rigid component in the soft actuation system). Both designs have free-floating ‘feet’ (rotational links) which help to right the design during tumbling/landing.