Bipedal Descender
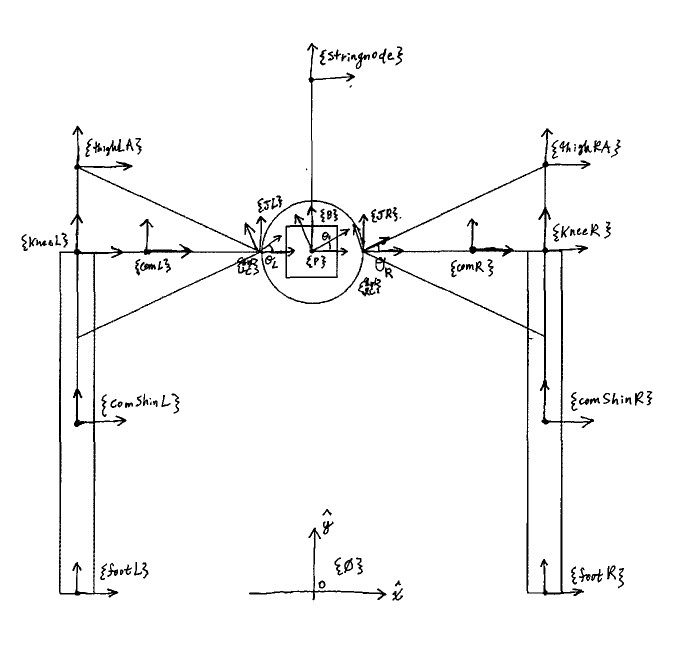
This project was to create a dynamic simulation of a two-legged tumbling robot. In this simulation, the gravity and environmental parameters are meant to model a Martian chasm. The robot itself is on a tensile string, and undergoes dynamic, plastic impact with the various outcrops on its way down. Simulation was programmed in Mathematica.
This model was inspired by the Strandbeests of Theo Jansen, which utilize the interplay of environmental forces (e.g., wind, gravity, etc.) and mechanical properties (e.g., springs, pulleys, airfoils, etc.) to effect bio-inspired motion.