Bias-Aware Interface Remapping for Assistive Teleoperation
Expanding access to multi-DOF robotic control by optimizing for individual motor constraints
Andrew Thompson, Larisa Loke, Brenna Argall | Northwestern University + Shirley Ryan AbilityLab
Overview
This project developed and deployed a bias-aware interface remapping algorithm for individuals with motor impairments using low-DOF joysticks. The system reinterprets sparse input patterns to expand access to the full control space of assistive robots—without relying on explicit mode switching.
Unlike fixed axis-aligned control mappings, our method statistically analyzes user-specific input behavior and generates full-rank mappings using convex hull expansion and sparse vector decoding. The system was tested in an IRB-approved study involving participants with SCI and stroke.
Motivation
- Many users operate assistive joysticks in strongly biased patterns (e.g., circular motion or single-axis preference).
- These constraints reduce access to the full range of robotic functionality (e.g., 6-DOF control).
- Existing solutions rely on mode switching, which adds cognitive burden and impedes fluidity.
- Our system remaps these biased inputs into full-rank command spaces by learning from natural user behavior.
System Design
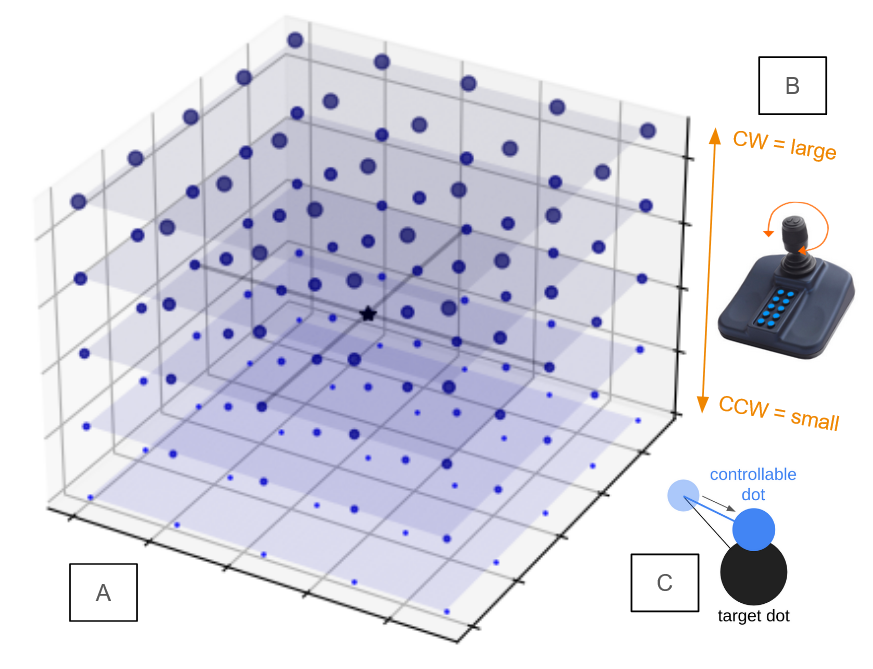
Input Space Modeling
- Captured joystick trajectories across calibration tasks.
- Computed empirical convex hull of user input space.
- Identified input directions with low variance or dropout.
- Constructed a mapping matrix to distribute joystick movement over 6-DOF robot control space.
Mapping Strategy
- Used sparse basis expansion to project 2–3 axis joystick data to a higher-rank output vector.
- Added gain compensation and thresholding logic to stabilize near-degenerate directions.
- Embedded mapping in real-time teleoperation loop using ROS2.
Deployment & Evaluation
- Study Participants: N = 8
(5 SCI, 3 Stroke) - Hardware: 3-axis assistive joystick (mounted), Kinova Gen2 robotic arm
- Tasks:
- 2D planar reaches
- 3D endpoint positioning
- Orientation alignment tasks
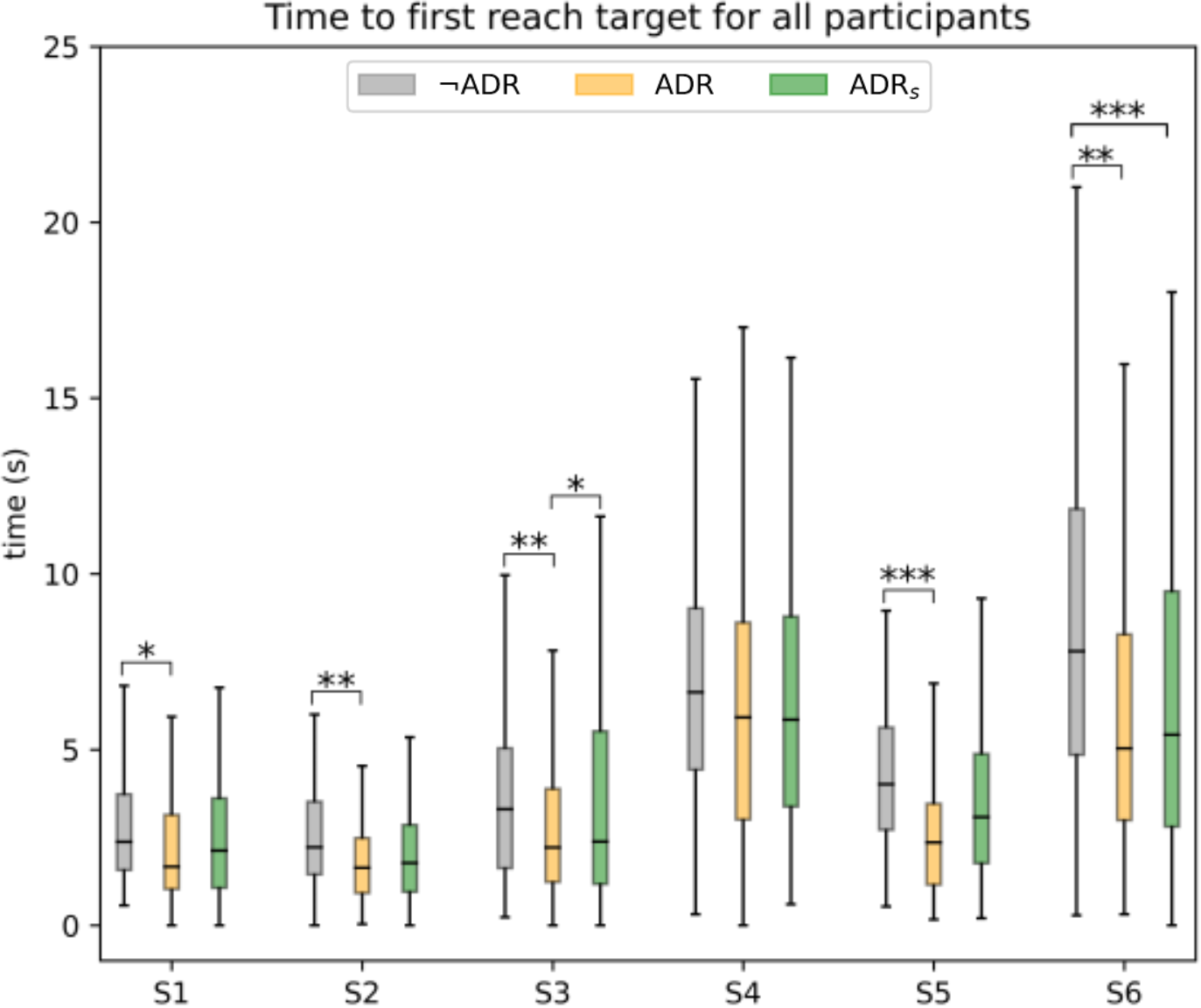
Metrics Collected
- Task completion time
- Path smoothness
- Input command entropy
- Control subspace utilization
- GUI logs and qualitative feedback
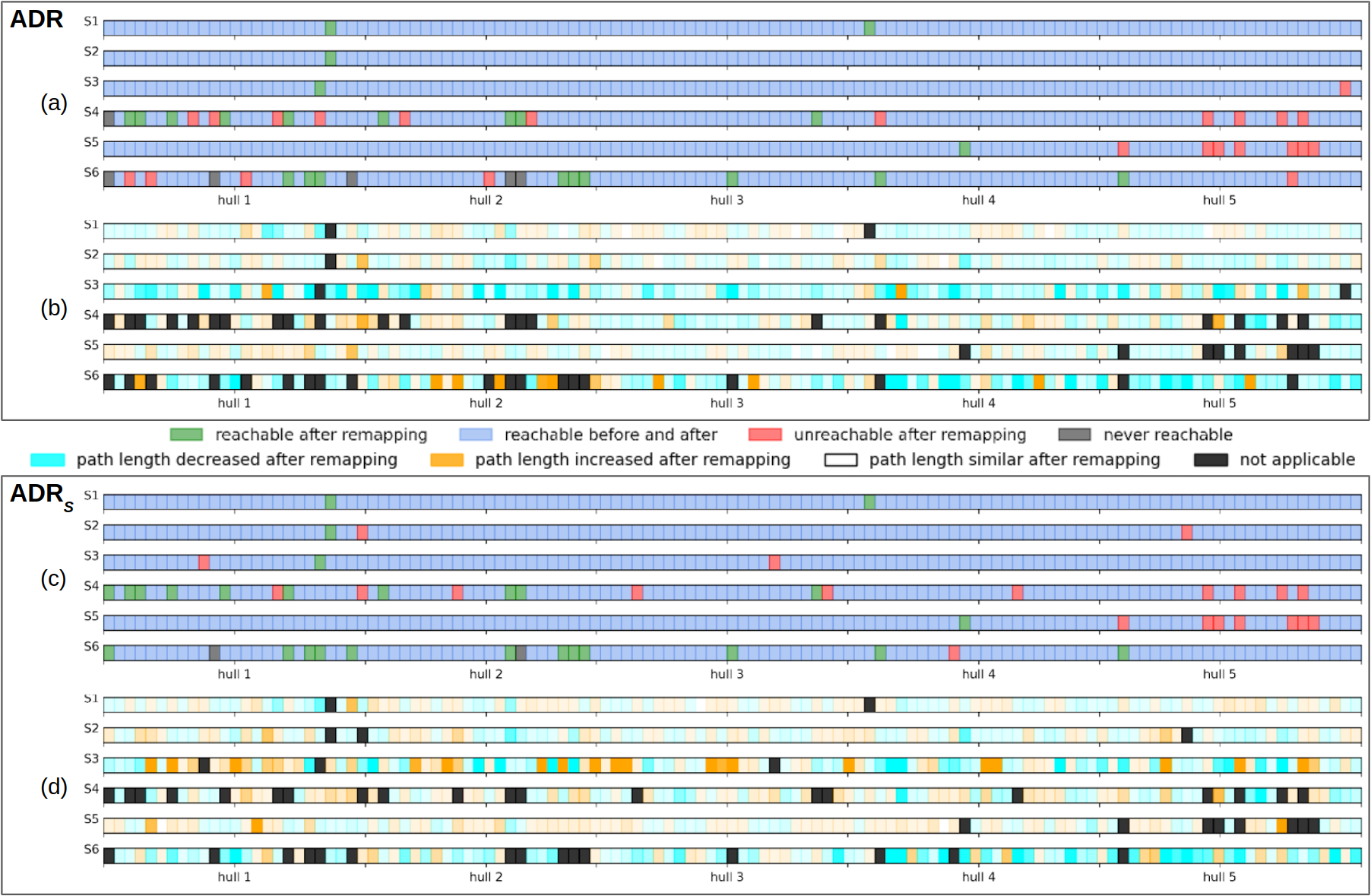
Key Contributions
- Developed a real-time remapping algorithm customized to user-specific bias patterns.
- Enabled full 6-DOF control from a low-DOF joystick with no mode switching.
- Designed a custom OpenGL-based GUI to collect detailed usage metrics and visualize interface behavior.
- Demonstrated measurable performance improvement and increased expressiveness over baseline mappings.
Design Tradeoffs
| Challenge | Approach |
|---|---|
| Near-singular input patterns | Used convex hull regularization + sparse decoding |
| Real-time stability | Applied smoothing and bounded velocity control |
| Adaptability vs. user learning | Fixed mapping per session to allow learning, but tunable between sessions |
| Interface generality | Mapping tailored per user but used shared core logic |
Citation
ICORR 2022:
Control Interface Remapping for Bias-Aware Assistive Teleoperation
Andrew Thompson, Larisa Loke, Brenna Argall Read the full paper (PDF)
Access
The interface mapping logic and experimental task GUI are implemented in a private ROS + OpenGL research repository.
- Summary PDF, logs, and sanitized code excerpts available upon request.
- Core algorithm written in Python; live integration with Kinova control via ROS2 services.