Bioinspired algorithm for efficient exploration in a densely-occluded environment
This project was completed as part of Dr. Malcolm MacIver’s course, “Computational Neuromechanics and Neuroethology”, where we were tasked on an individual basis to expand upon a codebase actively used by his research group. This codebase’s intent is to model predator/prey interactions using intelligent, autonomous agents in simulation. One focus of the course—and of the research which his group has already published—is the effect of environmental density on agent behaviors. I decided to try and apply a handful of navigation techniques to the agent to see if I could optimize the agent’s path-length within the context of a novel, potentially dangerous, and variationally dense environment.
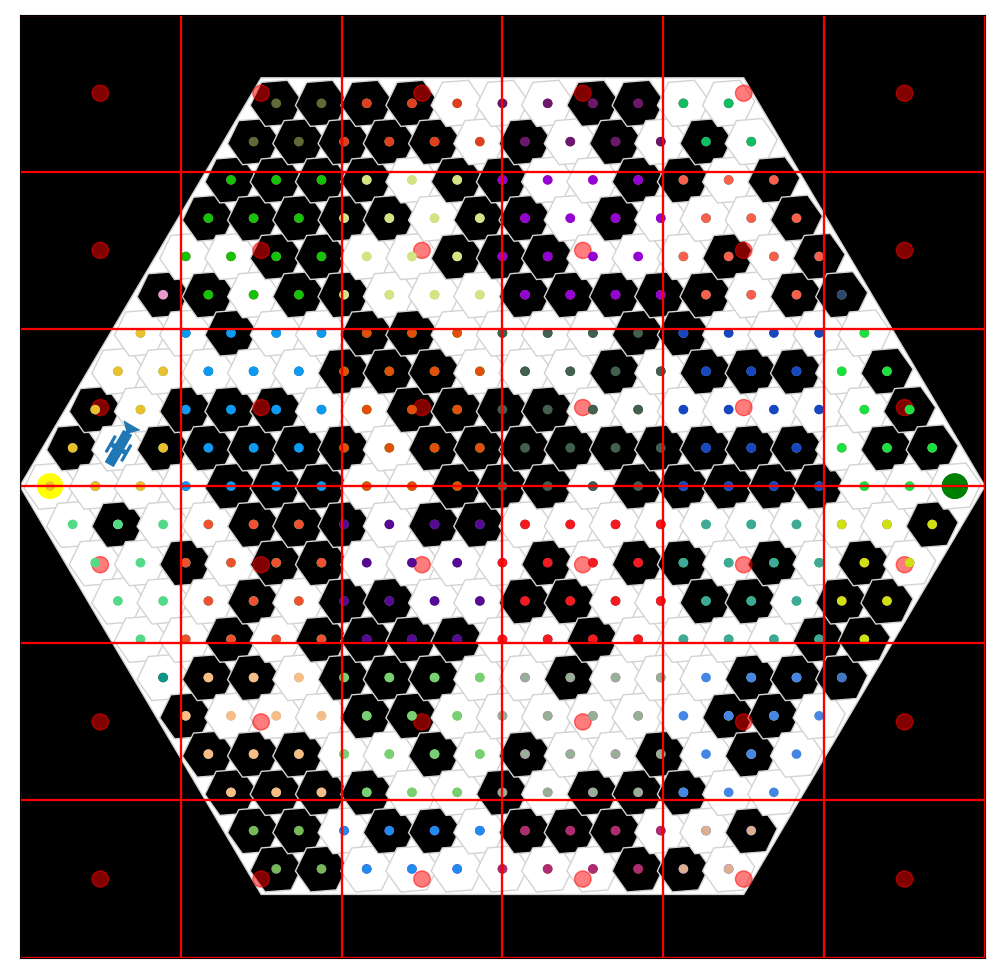
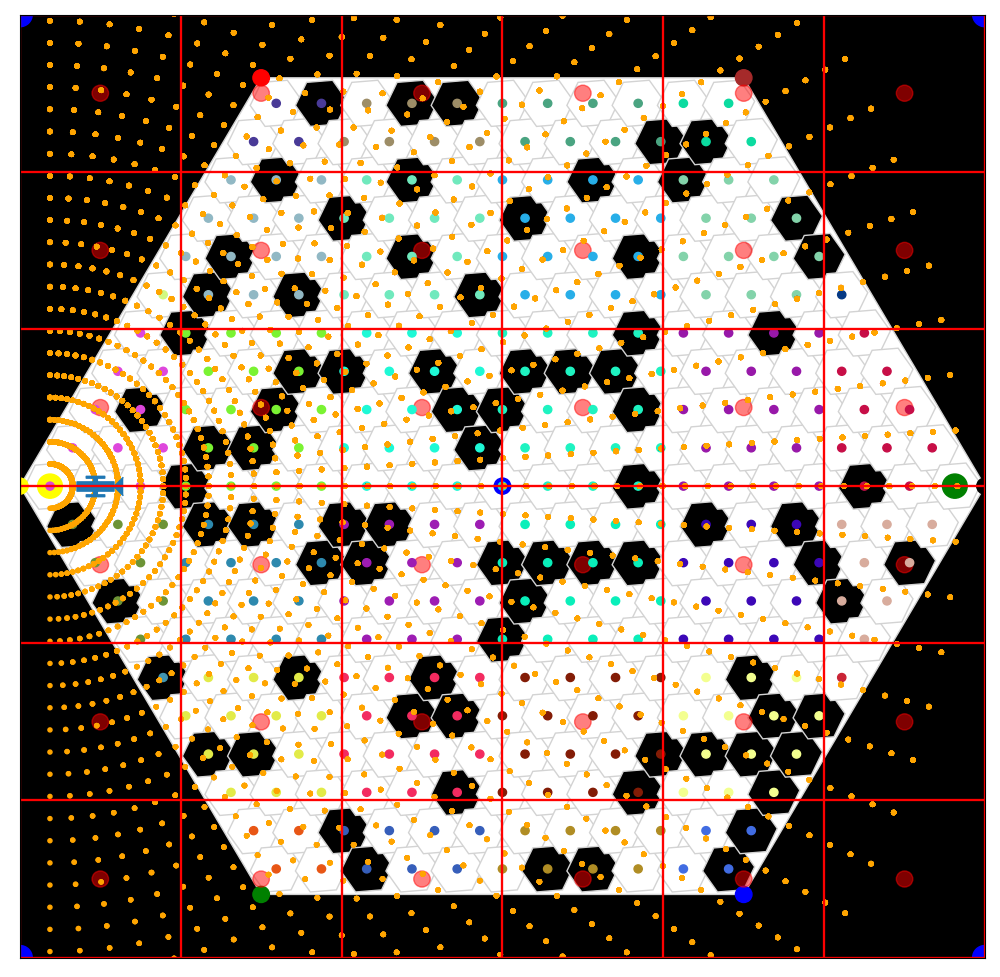
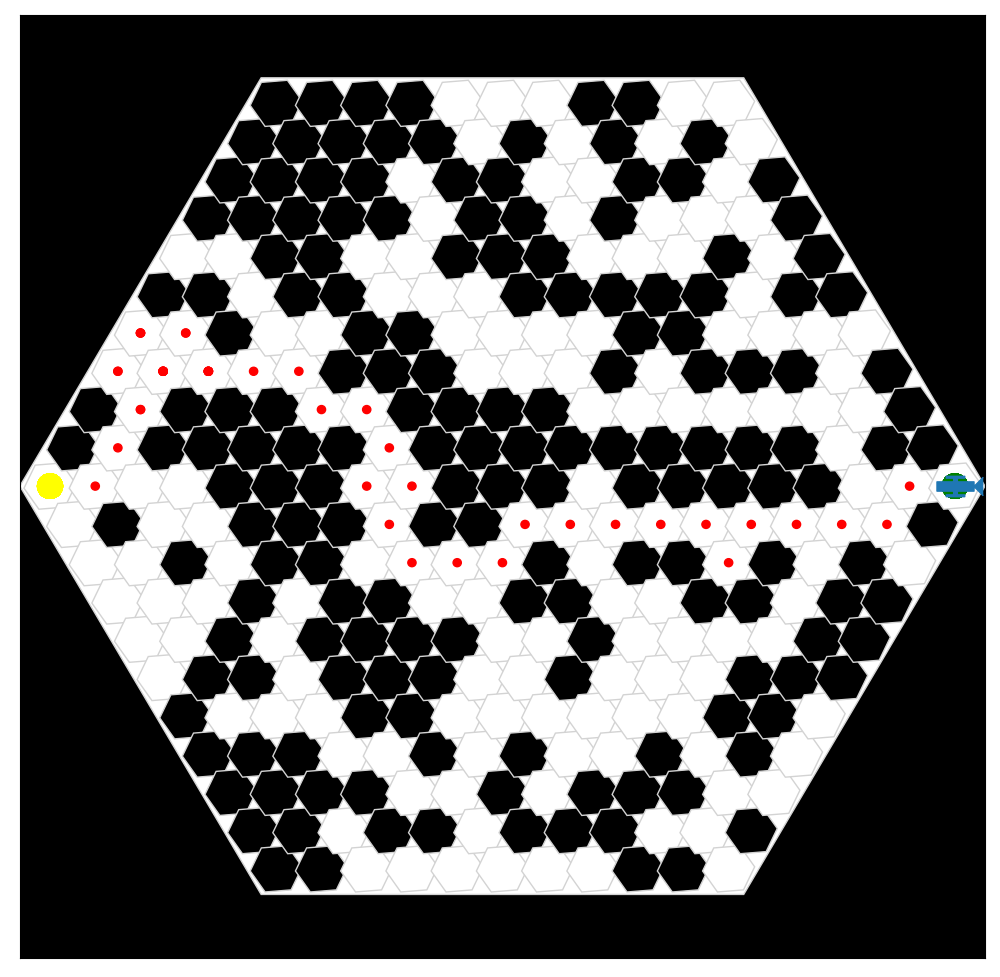
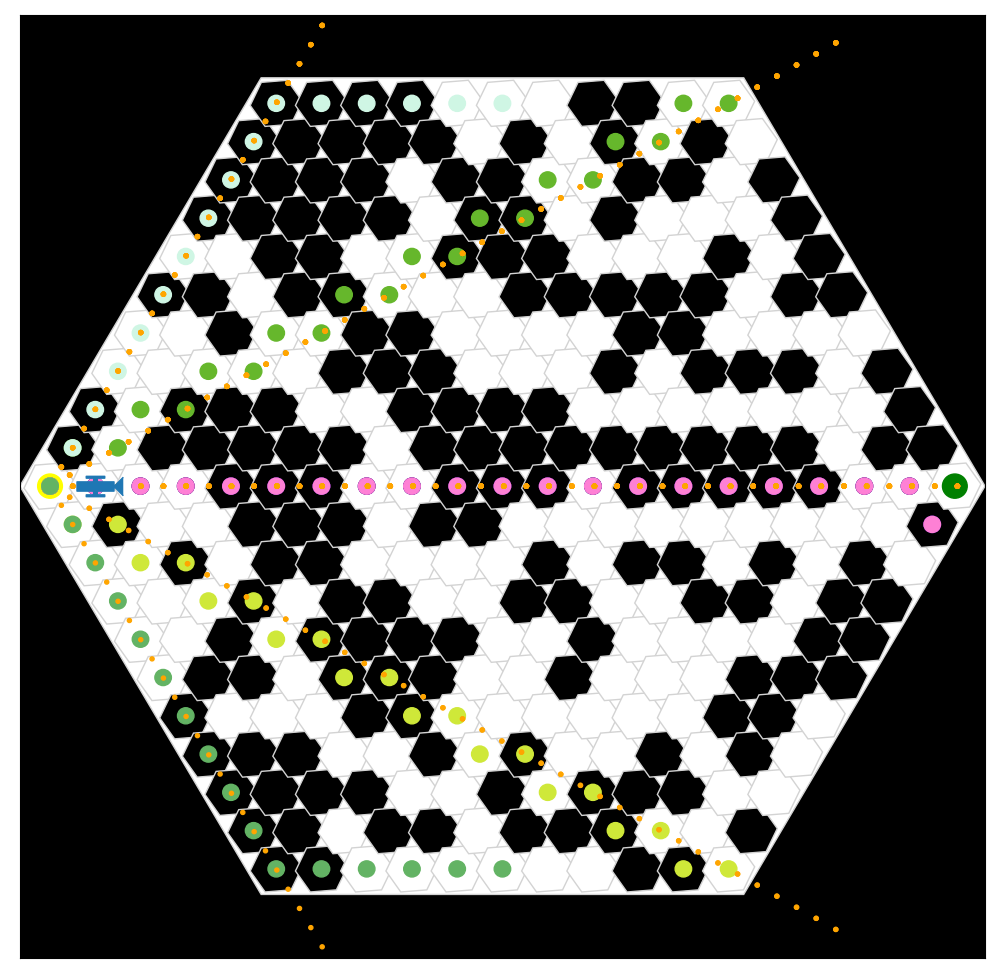 [TOP LEFT] the use of ray-tracing to check for local features of the environment. [TOP RIGHT] the use of spatial binning ("patches") to keep discovered environmental features within memory in an efficient manner. [BOTTOM LEFT] simultaneous ray-tracing and spatial binning (sRTSB). [BOTTOM RIGHT] Optimized SLAM within a heavily occluded environment (using sRTSB).
[TOP LEFT] the use of ray-tracing to check for local features of the environment. [TOP RIGHT] the use of spatial binning ("patches") to keep discovered environmental features within memory in an efficient manner. [BOTTOM LEFT] simultaneous ray-tracing and spatial binning (sRTSB). [BOTTOM RIGHT] Optimized SLAM within a heavily occluded environment (using sRTSB).
See more details of my algorithmic approach in this slide-deck!